Autori
Filippo D’Ippolito, Marco Massaro and Antonino Sferlazza
Abstract
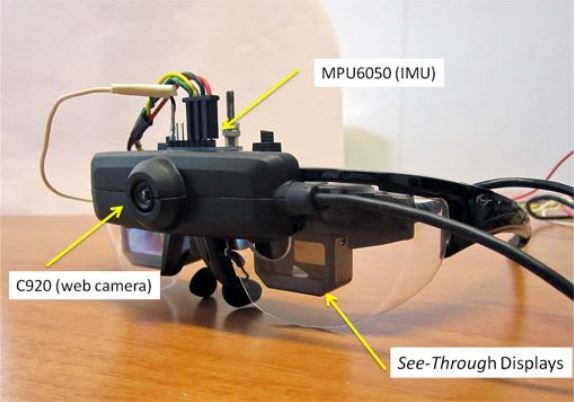
The visual tracking of an object is a well-known problem, and it involves many fields of applications. Often a single sensor, the camera, could not provide enough information in order to track the whole object trajectory due to a low updating rate; therefore a multi-sensor system, based also on inertial measurements, could be necessary to improve the tracking accuracy. This leads to the fundamental question: how can information from different sensors be combined when they work at different rates? In this paper an approach based on recursive parameter estimation focusing on multi-rate situations is suggested. The problem is here formulated as the state-of-the-art problem of the visual tracking of an object in augmented reality environments. The multi-sensor system consists of a webcam and a 3-axis MEMS inertial sensor both with different sample rates. The augmented reality application has been designed for the object detection problem, and it has been tested experimentally in a suitably developed test set-up.




