Autori
Mattia Zorzi
Abstract
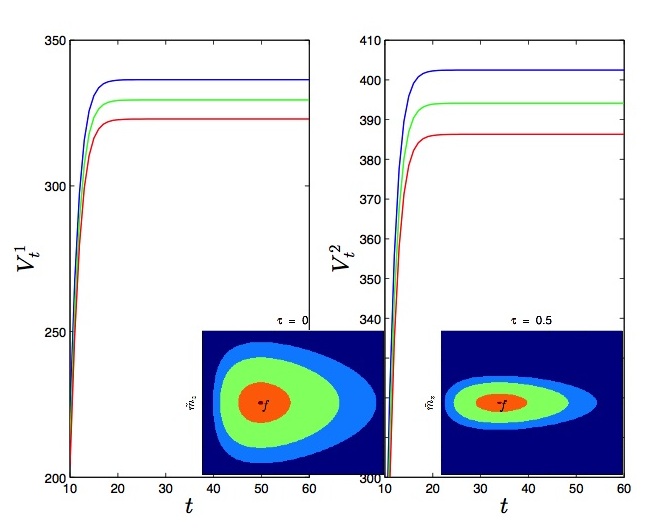
In this poster we face the robust filtering problem using the risk sensitive approach. We show how to extend the usual risk sensitivity filter to a family of risk sensitivity filters. In particular, we show the convergence of one of these risk-sensitive filters by placing an upper bound on the risk-sensitivity parameter. Finally, we show how to extend this family of risk sensitive filters to the case wherein the risk sensitivity parameter is time-varying and chosen at each time step in such a way that the least favorable statistics belongs to the ball centered about the nominal statistic and with a fixed radius c.




