Autori
Mattia Mattioni, Salvatore Monaco DIAG and Dorothée Normand-Cyrot
Abstract
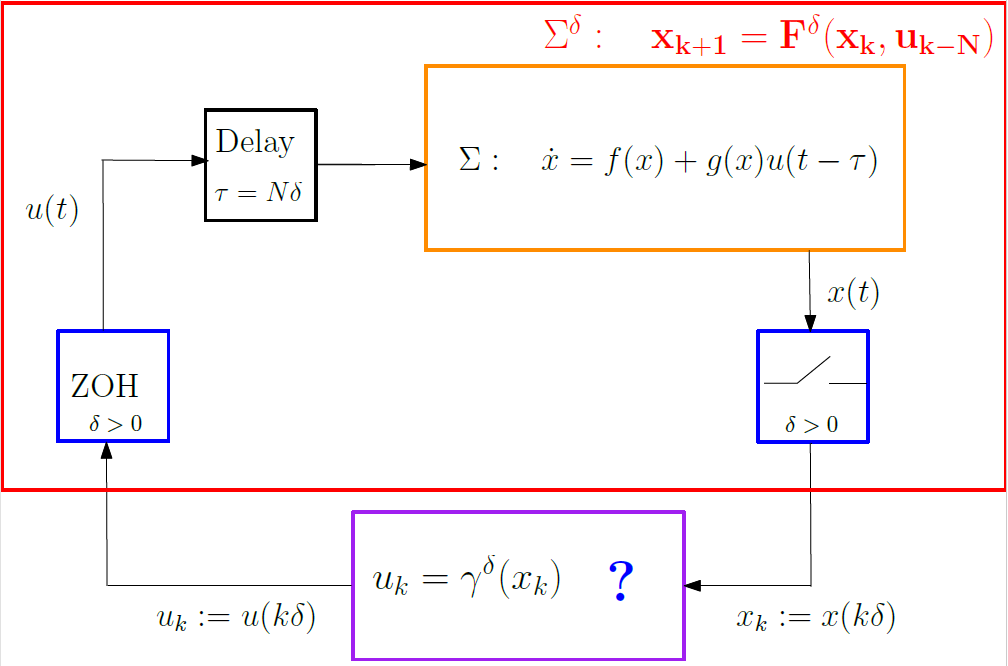
Stabilization of nonlinear delayed system has been introducing amazing challenges for the control community leaving a lot of questions still unanswered. Here, we address the problem of stabilizing sampled-data nonlinear systems affected by input delayed. In particular, we show that under suitable hypotheses on the delay length τ, a stabilizing state feedback can be computed by employing Immersion and Invariance (I&I) whenever there exists a continuous-time solution for the delayed-free system (i.e., when τ = 0). The design proceeds in two steps: first, assuming τ, we construct a sampled-data stabilizing feedback by solving an Input-Lyapunov Matching (ILM) problem for the delayed-free system so ensuring closed-loop stability; then, I&I stabilizability of the delayed sampled-data equivalent dynamics is proven by constructing a digital feedback that stretches the delayed trajectories onto the manifold associated with the delay-free ones under the preliminary computed feedback. The proof is constructive for the stabilizing controller. The stability properties under approximate control solutions are addressed as well.
Sessione




