Autori Francesco Amato, Domenico Colacino, Carlo Cosentino and Alessio Merola Abstract In…

Autori Francesco Amato, Domenico Colacino, Carlo Cosentino and Alessio Merola Abstract In…
Autori Fanny Ficuciello Abstract The use of anthropomorphic hands has become a…
Autori Fabio Ruggiero Abstract In this extended abstract, the concept of robotic…
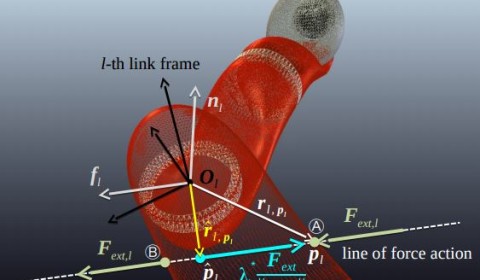
Autori Gabriele Buondonno and Alessandro De Luca Abstract When a robot physically…
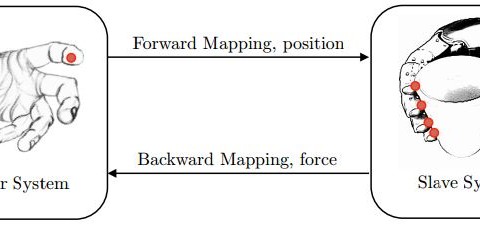
Autori Gionata Salvietti, Leonardo Meli, Monica Malvezzi and Domenico Prattichizzo Abstract In…