Autori
Gionata Salvietti, Leonardo Meli, Monica Malvezzi and Domenico Prattichizzo
Abstract
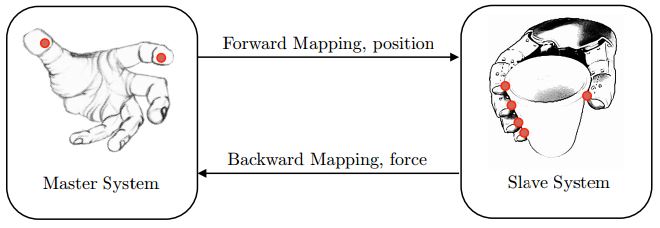
In thisextended abstract, we present our latest results on a novel bilateral telemanipulation framework to tame master and slave devices having different structures. This condition applies to multi-contact teleoperation scenarios where the number of contact points at the slave side and the number of interaction points at the master side are different. An example is a master device interacting with the thumb and the index fingertips of the human operator and, as slave device, a robotic arm with a multi-fingered robotic hand. In case of a manipulation task, it is not straightforward to transmit motion commands and reflect forces from the interaction with the environment. A general telemanipulation framework, that does not consider the specific kinematics of the devices involved, is needed. The main idea of this research line is to take advantage of a virtual object as a mediator between the master and slave side. The arising forward and backward mapping algorithms are able to relate the motions and the exerted forces of very dissimilar systems. The approach has been evaluated considering different master and slave devices. The proposed results can be extended to cooperative grasping scenarios where multiple robots tele-manipulate the same object.




