AUTONOMOUS VEHICLES
Co-chair: Giovanni Indiveri e Francesco Basile
Luogo e data
Martedì 6 settembre, ore 14:00, Sala Multimediale
Articoli
| 14:00 | Laura Giarre’, Daniele Croce, Ilenia Tinnirello and Domenico Garlisi | |
| 14:20 | Gabriel Rodrigues de Campos, Fabio Della Rossa and Alessandro Colombo | |
| 14:40 | Alessio Iovine, Elena De Santis and Maria Domenica Di Benedetto. | |
| 15:00 | Roberto Rossi and Paolo Rocco | |
| 15:20 | Riccardo Costanzi | |
| 15:40 | Danilo Caporale, Alessandro Settimi, Mirko Ferrati and Lucia Pallottino |

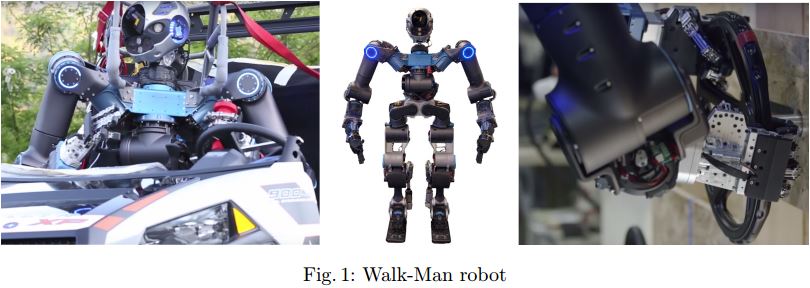
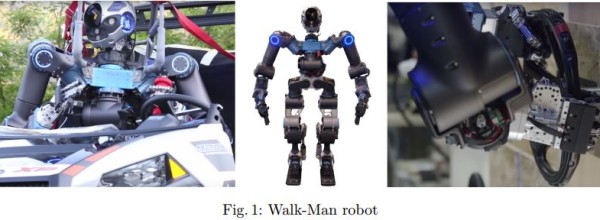
Primitive based planning with application to the Walk-Man humanoid robot
Autori Danilo Caporale, Alessandro Settimi, Mirko Ferrati and Lucia Pallottino Abstract Robotics is emerging as one of the most rapidly developing engineering fields. We are…
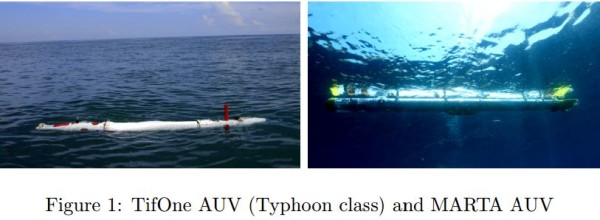
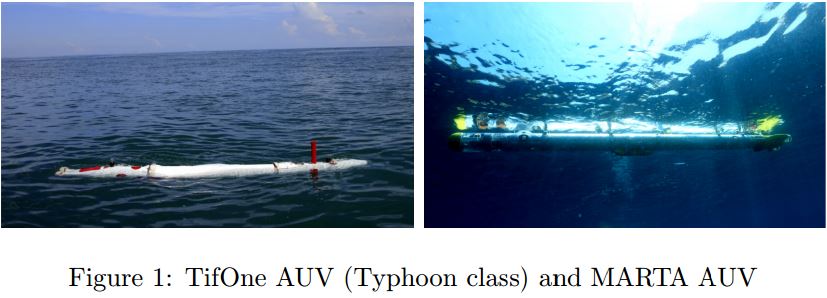
Navigation Systems for Unmanned Underwater Vehicles
Autori Riccardo Costanzi Abstract Navigation is the crucial part of the control system of Unmanned Underwater Vehicles mainly because of the impossibility of exploiting positioning…

Trajectory Generation and Control for Aerial Manipulation
Autori Roberto Rossi and Paolo Rocco Abstract In the last decade, aerial robotics has received increasing attention both in the scientific literature and in the…
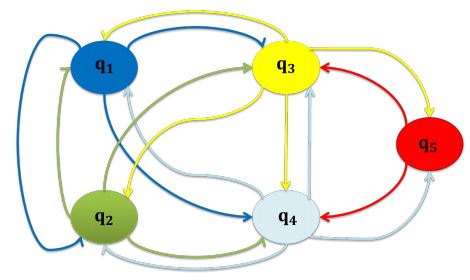
Safe Human-Inspired Mesoscopic Hybrid Automaton for Autonomous Vehicles
Autori Alessio Iovine, Elena De Santis and Maria Domenica Di Benedetto Abstract Traffic control is one of the most studied problems in engineering because of…
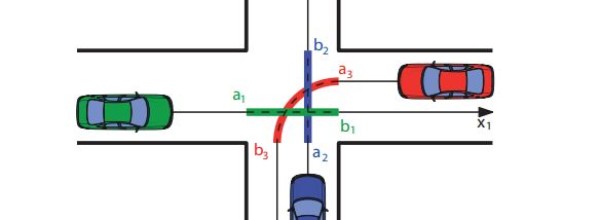
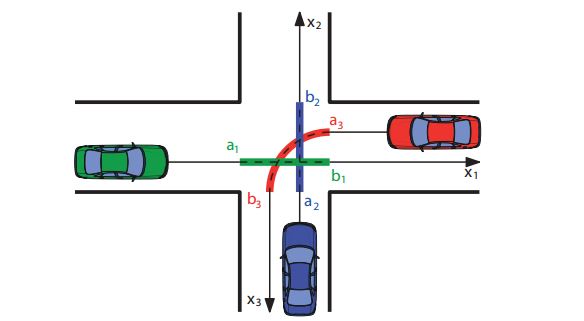
Safety verification methods for human-driven vehicles at traffic intersections: optimal driver-adaptive supervisory control
Autori Gabriel Rodrigues de Campos, Fabio Della Rossa and Alessandro Colombo Abstract We design an optimal, driver-adaptive supervisor algorithm for collision avoidance at an intersection.…
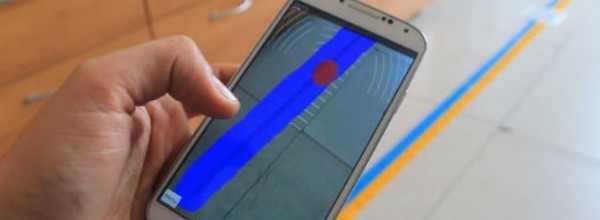
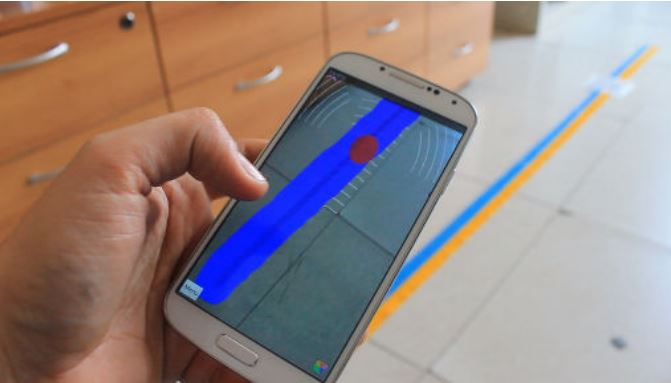
A smartphone-based navigation and orientation system
Autori Laura Giarre’, Daniele Croce, Ilenia Tinnirello and Domenico Garlisi Abstract In this paper we present a low-cost augmented reality system designed to meet the…