Autori
Giovanni Pedroncelli, Maria Pia Fanti, Agostino Marcello Mangini and Walter Ukovich
Abstract
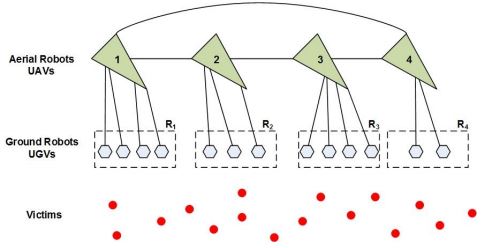
This contribution addresses the problem of robotic task allocation for incident response. In particular, we propose a solution for the distributed dynamic assignment of ground robots for the extraction of victims within an incident scene.
Aerial robots communicate among them in order to assign tasks to the ground robots for victim extraction in the shortest possible time. Aerial robots perform two consecutive distributed algorithms: the first one aims at correctly detecting in a completely cooperative manner the exact positions and criticality of the victims of the incident; the second one consists of distributed multi-agent optimizations in order to reach a common assignment of the victims needing to be extracted.




