Autori
Filippo Arrichiello, Alessandro Marino and Francesco Pierri
Abstract
This work presents a generalized decentralized fault diagnosis and accommodation scheme for a team of
networked cooperative autonomous agents that can be characterized either by a continous or discrete time dynamics. Each agent estimates, via a local observer, the overall state of the team; such an estimate is then used to compute the local control input to the agent, as well as to compute a set of residual vectors sensible to
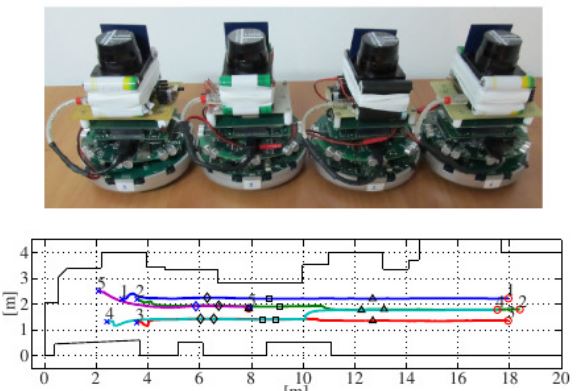
possible faults occurring on any of the teammates, even if not in direct communication. The occurrence of a fault on a teammate is recognized if the corresponding residual exceeds a suitable adaptive threshold. A recovery strategy, based on the estimate of the maximum detection time, is then applied to remove the faulty agent and rearrange the mission. The proposed approach was validated both via numerical simulations and experiments.




