Autori
Claudio Roberto Gaz and Alessandro De Luca
Abstract
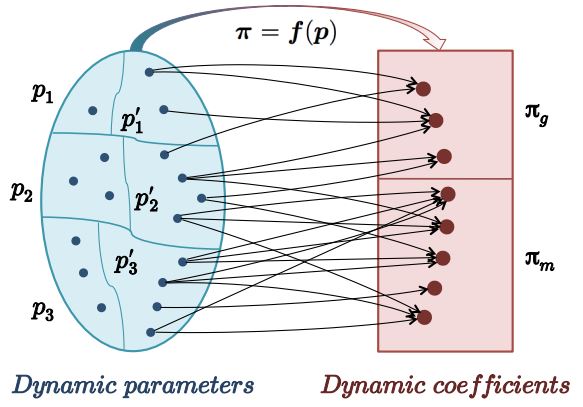
Once the so-called robot dynamic coefficients (i.e., suitable nonlinear combinations of the robot dynamic parameters, 10 for each link, that appears linearly in the dynamic model) have been identified, a feasible set of link dynamic parameters can be extracted from the obtained data, so at to satisfy also user-defined physical bounds. The numerical values of the link parameters are needed when using Newton-Euler routines for efficient inverse dynamics computations or when performing dynamic simulations with standard CAD-based systems like V-REP. Recently, we have proposed a general technique for addressing this problem and provided complete results for the 7R KUKA LWR4+ robot. This extraction technique can be extended to handle the additional presence of an unknown payload rigidly held at the robot tip. In particular, we exploit and take advantage of how the payload mass, center of mass position, and inertia matrix modify the original robot dynamic coefficients previously identified without payload.




