Autori Pasquale Palumbo, Marco Vanoni, Valerio Cusimano, Stefano Busti, Francesca Marano, Costanzo…
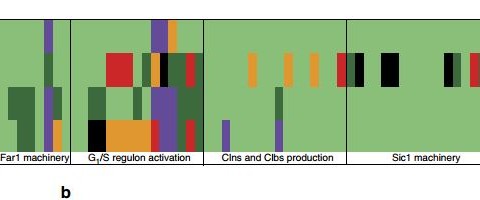
Autori Pasquale Palumbo, Marco Vanoni, Valerio Cusimano, Stefano Busti, Francesca Marano, Costanzo…
Autori Giorgio Battistelli, Luigi Chisci and Nicola Forti Abstract This work deals…
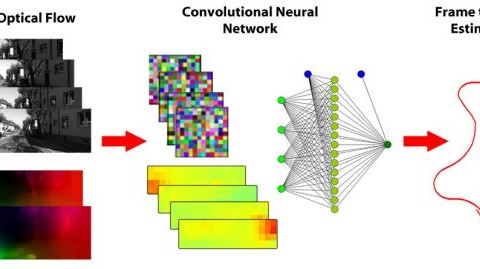
Autori Gabriele Costante, Michele Mancini, Paolo Valigi and Thomas Alessandro Ciarfuglia Abstract…

Autori Francesco Amato, Domenico Colacino, Carlo Cosentino and Alessio Merola Abstract In…
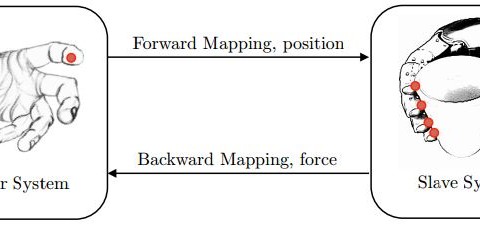
Autori Fanny Ficuciello Abstract The use of anthropomorphic hands has become a…
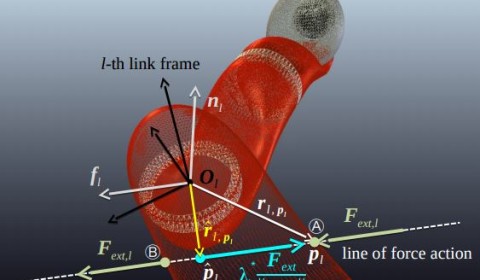
Autori Fabio Ruggiero Abstract In this extended abstract, the concept of robotic…
Autori Gabriele Buondonno and Alessandro De Luca Abstract When a robot physically…
Autori Gionata Salvietti, Leonardo Meli, Monica Malvezzi and Domenico Prattichizzo Abstract In…
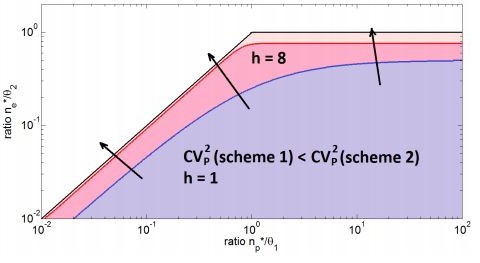
Autori Alessandro Borri, Pasquale Palumbo and Abhyudai Singh Abstract Synthetic Biology combines…
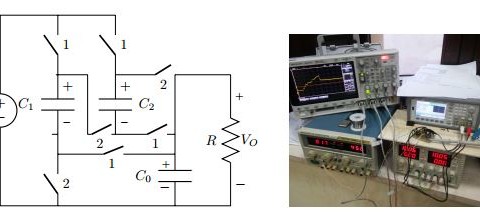
Autori Elisa Mostacciuolo, Francesco Vasca and Silvio Baccari Abstract Averaging techniques are…